



 b体育磁控仿鱼微型机器人实现复杂运动的高效学习—新闻—科学网
来源:B企业
b体育磁控仿鱼微型机器人实现复杂运动的高效学习—新闻—科学网
来源:B企业
 发表时间:
2024-05-16
发表时间:
2024-05-16
5月8日,中国科学院深圳进步前辈技能研究院集成所智能仿生研究中央的徐升以及徐天添研究团队互助,提出了一套针对于微型仿鱼磁驱念头器人的繁杂运动进修节制要领。
研究团队经由过程宽度进修收集练习得到了可控磁场变迁与仿鱼呆板人多种动作基元之间的瓜葛纪律,实现了仿鱼呆板人的繁杂运动,而且本要领无需繁杂调参,具备优秀鲁棒不变性,保障了运动历程不受外界扰动影响。该结果揭晓在智能节制范畴权势巨子期刊IEEE Transactions on Cybernetics。
该研究中,中国科学院深圳进步前辈院集成所副研究员徐升为第一作者,中国科学院深圳进步前辈院集成所研究员徐天添为通信作者,中国科学院深圳进步前辈院为第一单元。
微型仿鱼呆板人因为构型合理、标准很小,可以更为矫捷地于繁杂狭窄空间内穿越功课,于微孔探查、靶向医治等小标准操作范畴具备伟大的运用潜力。可是,受磁场与呆板人运动之间的强非线性影响,使患上呆板人按要求轨迹运动节制十分具备应战。
此外,于繁杂场景中,如人体内,抱负方针轨迹的正确坐标每每未便获取,限定了追踪节制计谋的运用。是以,十分有须要将微型呆板人的底层运动封装为直走、直角弯、S形弯、C形弯等基本运动,并将这些基本运动作为高层运动指令库的基元,便在于后续的宏不雅运动路径计划中按需挪用,降低及时节制指令的解算繁杂度。对于此,研究团队联合宽度进修理论,对于磁控仿鱼呆板人的运动基元开展练习进修完成多种繁杂运动。
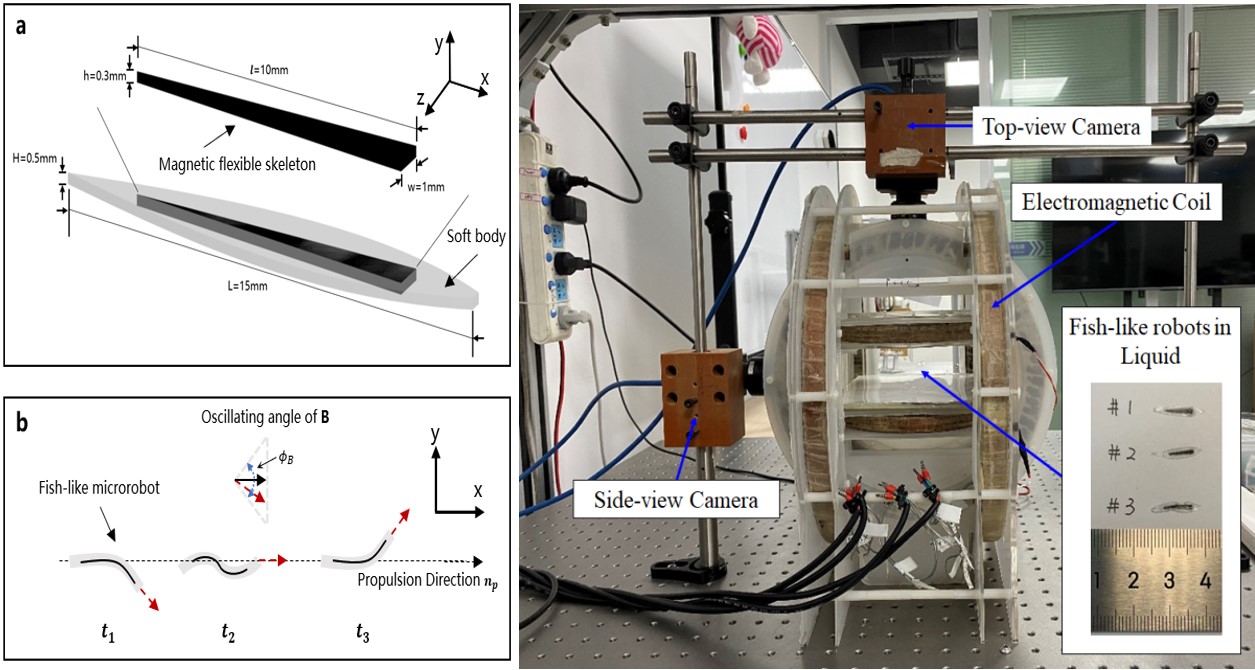
微型仿鱼呆板人布局及运动道理,磁驱动试验体系 科研团队供图
研究团队设计了以宽度神经收集为主体的微型呆板人基本运动节制器,基在李雅普诺夫不变理论,推导了保障呆板人运动不变的节制器收集参数约束,年夜年夜简化了差别运动基元的节制器参数练习进修历程。此外,研究团队还提出了以磁场参数变迁与呆板人速率矢质变化为所需数据的节制器收集参数练习要领,使用者只需经由过程转变练习数据的品种,便可得到多种运动基元,该要领还思量了不变约束的练习算法,可以包管所得到的节制器一定不变。
经由过程仿真及试验,研究团队应用所提的进修节制要领得到了锐角弯、J形弯、S形弯等多种运动基元的微型呆板人节制器,并开展了仿鱼呆板人避障运动试验。于呆板人运动历程中,研究职员经由过程报酬摇摆容器、暴力碰触呆板人等体式格局,模仿了真实场景中可能存于的繁杂扰动。不雅察发明,仿鱼呆板人于繁杂情况中,间接挪用C形弯,S形弯等运动基元实现高效避障,经由过程使用所提要领呆板人都可以抵达终极指定区域,验证了所提要领的强抗扰威力。
论文通信作者徐天添暗示,该结果切合高层运动指令计划的思惟,年夜幅简化了及时节制指令解算繁杂度,为微型呆板人的多机集群运动或者无参考轨迹最优运动计划打下根蒂根基。该研究无望应用于无人机、无人车和工业呆板人的繁杂运动节制。
相干论文信息:https://ieeexplore.ieee.org/document/10121060
版权声明:凡本网注明“来历:中国科学报、科学网、科学新闻杂志”的所有作品,消息网转载,请于正文上b����方注明来历以及作者,且不患上对于内容作本色性改动;微信公家号、头条号等新媒体平台,转载请接洽授权。邮箱:shouquan@stimes.cn。/b体育
